

Моторизованные Z позиционеры ELPB50C
Характеристики
| Возвратный зазор, мкм≤5 | Выходная мощность двигателя, Вт400 | Грузоподъёмность, кг10 |
| Датчик крайнего положения (встроенный)Omron | Датчик нулевого положения (встроенный)Omron | Длина кабеля, м0.4 |
| Длина хода, мм50 | Количество осей1 | Крутящий момент двигателя, Н · м1.27 |
Описание
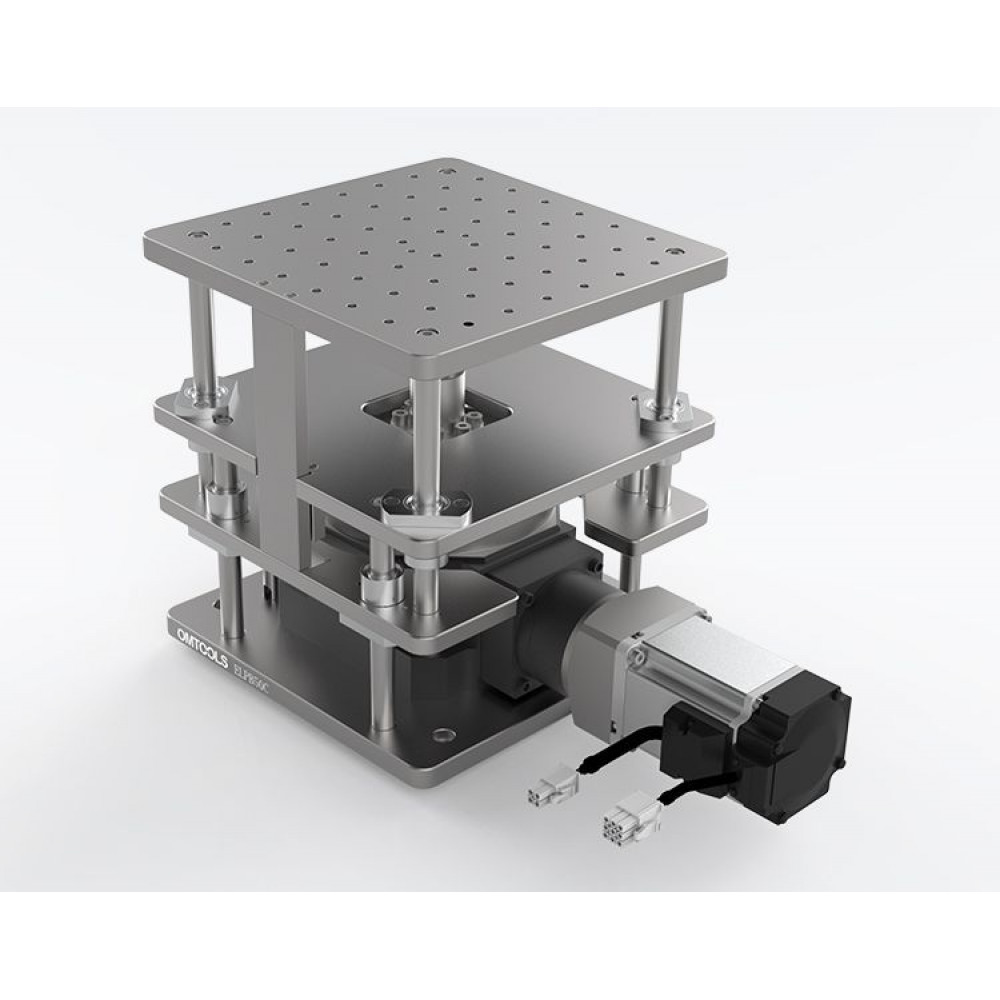
Моторизованные Z позиционеры ELPB50C
Моторизованные Z-позиционеры ELPB50C — это высококачественные устройства, предназначенные для точного позиционирования объектов в трёхмерном пространстве. Они идеально подходят для применения в различных областях, включая робототехнику, автоматизацию производства и другие сферы, где требуется высокая точность и надёжность.
Основные характеристики:
- высокая точность позиционирования;
- простота в установке и использовании;
- совместимость с различными системами управления;
- надёжная конструкция, обеспечивающая долгий срок службы.
С моторизованными Z-позиционерами ELPB50C вы сможете повысить эффективность работы и достичь более высоких результатов в своих проектах.
Технические характеристики Моторизованные Z позиционеры ELPB50C
| Возвратный зазор, мкм | ≤5 |
|---|---|
| Выходная мощность двигателя, Вт | 400 |
| Грузоподъёмность, кг | 10 |
| Датчик крайнего положения (встроенный) | Omron |
| Датчик нулевого положения (встроенный) | Omron |
| Длина кабеля, м | 0.4 |
| Длина хода, мм | 50 |
| Количество осей | 1 |
| Крутящий момент двигателя, Н · м | 1.27 |
| Логика вывода | Датчик крайнего положения: При достижении лимита выходной транзистор выключен (OFF); Датчик нулевого положения: при достижении позиции выходной транзистор включен (ON) |
| Максимальная скорость, мм/с | 10 |
| Марка и модель двигателя | Panasonic |
| Марка и модель привода | Panasonic |
| Марка энкодера | Renishaw |
| Масса, кг | 16 |
| Материал корпуса | Нержавеющая сталь |
| Наличие тонкой настройки | Нет |
| Напряжение питания датчика, В | DC24V ± 10% |
| Обработка поверхности | Пескоструйная обработка |
| Общая высота, мм | 198 |
| Параллелизм движения, мкм | ≤30 |
| Передаточный механизм | Прецизионный шариковый винт Ø16X4 |
| Потребляемый ток, мА | 30 и менее |
| Примечание | При максимальной частоте вращения без нагрузки используются теоретические расчеты и фактические измеренные значения частоты вращения серводвигателя 750 об/ мин. |
| Производитель | OMTOOLS |
| Прямолинейность движения, мкм | ≤30 |
| Рабочие оси | Z |
| Размер столика, мм | 200 х 200 |
| Разрешение энкодера, бит | 23 |
| Разрешение энкодера, мкм | 1 |
| Разъём кабеля | Два DB9 (male) |
| Рыскание, угл. сек. | ≤60“ |
| Серия | ELPB-C - Двухкамерные подъёмники |
| Совместим с вакуумом | Нет |
| Совместим со сверхнизкими температурами | Нет |
| Тангаж, угл. сек. | ≤60“ |
| Тип двигателя | Серводвигатель 400 Вт |
| Тип направляющей | Линейный подшипник |
| Точность двунаправленного позиционирования, нм | ≤ ±2,5 |
| Управление выводом | Способ вывода: Выход с открытым коллектором NPN; Источник питания: DC5-24V; Источник питания OFF: ниже 0,5 мА; Остаточное напряжение: ниже 0,7 В (при токах 50 мА), ниже 0,4 В (при токах 5 мА) |
| Энкодер | Оптический градуированный датчик |
Характеристики
| Тип кабеля | Высокогибкий кабель |
|---|



